摘要
VINS-Mono是最新的基于单目与IMU融合的SLAM系统,整篇文章详细描述了VINS系统的各个部分,与ORB-SLAM-Inertial进行对比学习,进一步加深IMU预积分如何应用到一个单目SLAM系统中去。
概述
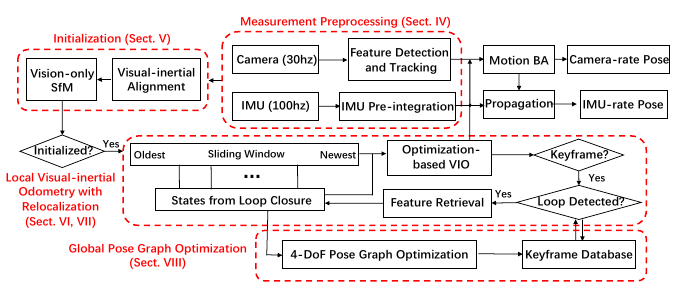
VINS主要分为4个部分:
(1)观测数据的预处理
负责图像特征提取,IMU测量值的预积分
(2)初始化
提供所有初始信息,包括位姿、速度、重力向量、陀螺仪偏差和三维地图点
(3)VIO
将IMU预积分信息与视觉特征融合,形成紧耦合的VIO,并且带有重定位和回环检测功能
(4)位姿优化
验证重定位结果,执行全局优化来消除累积误差
观测数据预处理
1)图像数据预处理
VINS中,单目图像的追踪是通过 KLT sparse optical flow 算法进行的,提取的图像特征为角点特征,检测器(detector)通过设定像两个角点特征之间的最小像素间隔,来保证所提取的角点特征在图像中的分布。
在这一阶段还会执行关键帧的选择,需要满足两个条件。第一,当前帧和上一个关键帧之间要有足够的视差。第二,如果当前帧所追踪的特帧数目低于某个值,当前帧会被作为关键帧,以避免特征点追踪丢失的情况。
2)IMU预积分
这篇论文的IMU预积分在速度和平移上的与之前的两篇类似,但是在旋转上采用了四元数的方式。四元数的形式感觉上不如李代数来的简洁直观,采用四元数的方式的原因大概是跟作者之前的工作保持一致。
这篇论文还简单地给出了如何推导出预积分模型,主要思路就是将参考系从世界坐标系转换到预积分开始时刻的IMU坐标系下,从而可以将IMU的观测值分离出来。
公式(3)是世界坐标系下的计算公式。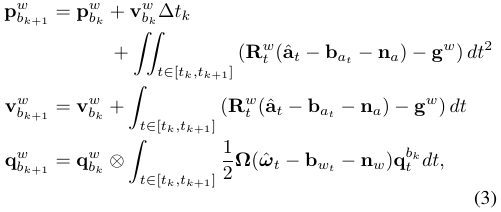
公式(5)是以积分开始时刻IMU坐标系下的计算公式。$\alpha,\beta,\gamma$为只与imu测量值相关的部分,如公式(6)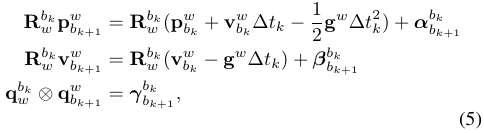

公式(7)为公式(6)的差分形式,要计算两个关键帧之间的预积分,即对每个观测值进行累加。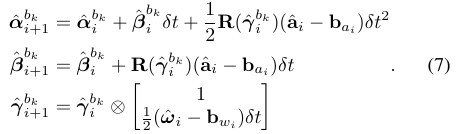
公式(9)给出了欧拉积分公式下系统状态的误差方程。得到协方差矩阵$P_{b_{k+1}}^{b_k}$。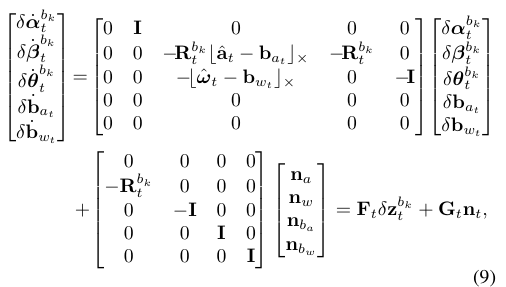
公式(10)给出了协方差矩阵的迭代求解方式。
同样对于系统状态的雅可比矩阵也可以用迭代的方式求解(11)。
当得到新的IMU偏差量之后,为了减少计算量,可以通过公式(12)的方式更新IMU预积分量。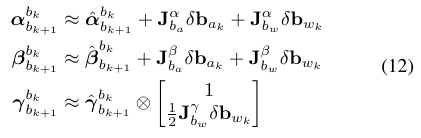
至此,得到了IMU的观测模型(13),即可建立基于IMU预积分的残差项。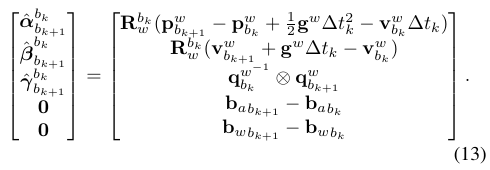
总得来说,IMU预积分模型都大同小异,对于雅可比矩阵和协方差矩阵的计算,还需要进一步的分析,但是感觉应该和前两篇论文是一样的。
估计初始化
与ORB-SLAM-Inertial不同的是,在本篇文章的初始化中,作者选择忽视加速度偏差,其理由是加速度偏差与重力在量级上相差比较大,加速度偏差很难被观测。
1)视觉初始化
与ORB-SLAM-Inertial类似,初始化过程将从纯视觉SLAM开始。当帧之间有足够的视差,就利用5点法恢复出旋转和平移,并对特征点进行三角化。根据当前的最后一帧和三角化的地图点,利用PnP方法对其他帧进行位姿估计。最后利用full-BA进行优化。另外,将第一帧图像作为世界坐标系的原点。
2)陀螺仪偏差初始化
陀螺仪的偏差估计原理上与ORB-SLAM-Inertial是相同的,只不过这里使用了四元数。如式(15)所示。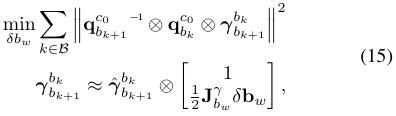
基于新得到的陀螺仪偏差,利用式(12)对IMU预积分项进行更新。
3)速度,重力向量和尺度初始化
把速度,重力向量和尺度作为估计量:
这部分的求解与ORB-SLAM-Inertial初始化的第二步是类似的,即将待估计的变量构造成一个超定方程,然后求其最小二乘解。但是在ORB-SLAM-Inertial作者曾指出,如果直接引入速度变量,会增加超定方程是病态的可能性。这篇文章中,并没有这样的考虑。
4)重力修正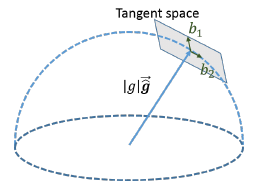
其基本原理就是利用上图所示的切线空间中的正交基$b_1$和$b_2$,计算其修正量$w1$和$w2$,修正后的重力向量为$g\cdot \bar{\hat{g}} + w_1b_1 + w_2b_2$。将其代入式(17),将$w_1$和$w_2$与(16)中的变量一起求解。正交基$b_1$和$b_2$可以通过如下的方式得到。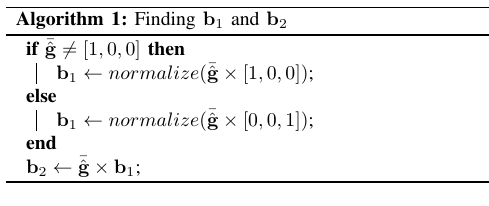
通过不断的迭代上述过程,直到$\hat{g}$收敛。
通过修正重力向量的方向,可以得到世界坐标系$(\cdot)^w$与参考坐标系$(\cdot)^{c_0}$之间的旋转$q_{c_0}^w$。利用$q_{c_0}^w$即可将之前得到的所有的速度修正到世界坐标系下。
对比ORB-SLAM-Inertial中的重力修正部分,此处的重力修正部分虽然不如ORB-SLAM-Inertial中来得简洁明了,但是其利用了重力向量只有两个自由度需要估计(pitch,roll)的优点,在计算速度和准确性上可能会存在优势。
紧耦合VIO
对于VIO,本文采用了基于滑动窗口的紧耦合的形式,在滑动窗口内所有要估计的系统状态如下: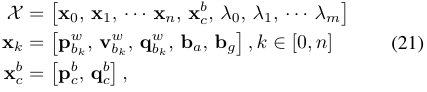
其中$x_k$表示IMU在第$k$张图片时的状态,$\lambda_l$表示第$l$个特征点的反向深度。
我们采取 visual-inertial bundle adjustment 的形式,来对系统状态进行优化:
分别包含了先验残差项,IMU残差项和视觉残差项。
1)IMU残差项
基于式(13)的可以建立式(24)的IMU残差项,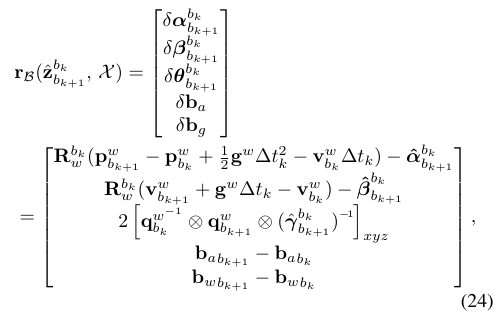
很奇怪的是,式(24)中的IMU预积分并没有包含偏差IMU偏差。
2)视觉残差项
与之前两篇论文中不同的是,VINS中所用的视觉残差项是基于球面的,而不是针孔的。这样做的好处是视觉模型可以兼容几乎所有类型的相机,包括广角相机和鱼眼相机。式(25)概括了整个视觉残差项的构造过程。
需要注意的是,这里的反投影是利用图像中的像素点坐标$[u,v]$得到三维空间中的特征点坐标。首先利用第$i$帧图像,该计算特征点坐标在当前相机坐标系下的三维坐标。然后利用第$j$帧图像对相同特帧点的观测,以及第$i$帧图像和第$j$帧图像之间的外参,同样计算出该特征点在第$i$帧图像相机坐标系下的三维坐标,在将两者的误差投影到正切空间,即可得到一个二维的残差值。其中$b_1$和$b_2$的计算与重力修正时用到的算法相同。
3)边缘化
为了保证滑动窗口内的关键帧数目保持在一个可以快速求解的数目,VINS中使用了 marginalization 方法,关键帧的选择方法如图所示:
边缘化方法使用了 Schur complement 方法,并将边缘化的观测数据与要被去除的状态,转化为先验信息,加入到整个优化问题中。
4)Motion-only Bundle Adjustment
为了进一步减小计算量,引入另一种BA的形式。
此处依旧沿用式(22),但不再优化像(21)中所示的所有变量,只优化位姿、速度和固定数目的IMU状态,而把特征点深度、外参、偏差和旧的IMU状态作为固定量。使用依靠所有视觉和IMU观测量的motion-only BA,而不是依靠单张图像帧的PnP方法,可以使得状态估计的结果更加平滑。
这里有点像ORB-SLAM中的Tracking线程干的事。
文中还提到了IMU-Rate的状态估计、失败检测及恢复。
重定位
重定位首先从回环检测开始。与ORB-SLAM类似,回环检测使用了词袋模型DBoW2,依赖于corner角点和BRIEF描述子。文中提到由于VIO可以观测roll和pitch,因此不需要依赖像ORB这种具备旋转不变性的特征。
检测到回环之后,要建立当前帧和回环帧之间的特征关联,通过BRIEF得到的特征关联会有很多的异常匹配,因此文中采用了基于对极几何和PnP的RANSAC来剔除异常匹配。
建立匹配之后,将利用匹配关系建立约束,如式(26)所示:
与式(22)相比,式(26)多了一个回环误差项。
全局位姿优化
重定位只是将当前滑动窗口与之前的位姿信息进行了对齐,为了获得全局一致的位姿信息,还需要进行全局位姿优化。之前也提到过,对于VIO来说,roll和pitch是客观测的,因此全局位姿的优化是一个四自由度的优化问题。
当关键帧被边缘化时,它会被加入到全局位姿图中。全局位姿图中的关联关系有两种,第一种称为 Sequential Edges, 是当前关键帧$i$在滑动窗口中与之前关键帧$j$之间的相对位置关系。如式(27)。
如果被边缘化的关键帧被检测到是回环,则会存在第二种关联关系,称为Loop Closure Edge,即关键帧与回环帧之间相对位置关系。其约束关系与式(27)相同。
有了关联关系之后,即可定义进行位姿图优化的残差项,如式(28)。
$\hat{\theta_i},\hat{\phi_i}$ 是可以从VIO中直接得到的 roll 和 pitch 的角度。
全局位姿优化问题即可构造为:
其中第一项是Sequential Edges,第二项为Loop Closure Edge。
为了保证VINS可以长时间的运行,防止位姿图过于庞大,在运行过程中采用了一种降采样的方式,来限制位姿图的尺寸。包含 Loop Closure Edge 的关键帧将会被保留,而某些与相邻关键帧很接近或者关联关系很类似的关键帧,就会被去除。
总结
实验部分暂时先跳过了。
初次学习VIO,通读整篇文章还是有些吃力,很多地方理解的还有些羞涩。希望能够结合VINS的代码,进一步加深理解。
下一步,好好撸代码吧!
参考文献
VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator
http://www.cnblogs.com/buxiaoyi/p/7353353.html