前言
ORB-SLAM的地图和定位可视化是通过Rviz进行展示的,而在ORB-SLAM2中,为了不依赖于ROS,ORB-SLAM2的可视化采用了pangolin库。而我的硕士课题有个需求,就是要使ORB-SLAM2的结果和Cartographer的结果同时显示在同一个可视化工具中,而Cartographer是采用Rviz显示的,还定制了专用的Rviz插件。思考再三,决定为ORB-SLAM2重新添加基于Rviz的可视化模块。
ORB-SLAM2的Rviz可视化
简单分析一下ORB-SLAM中关于Rviz的可视化,总结了以下几点:
1.ORB-SLAM的Rviz视化用了单独的一个类来完成可视化信息的发布:MapPublisher类
2.所有的可视化信息都是Rviz的Mark类型,根据发布的地图点,关键帧,Covisibility Graph,Spanning Tree和相机轨迹,设计了不同的Mark类型。
3.所有的可视化信息,包或地图,轨迹等都是从ORB-SLAM中的Map类中获取的。
4.每次获得一帧图像,进行Track后,利用MapPublisher类发布可视化信息。
5.在配置相应的Rviz,使其可以接收可视化信息。
明白了这几点之后,在ORB-SLAM2中添加Rviz可视化模块就很简单了,主要对源代码做两个改动。
1.添加MapPublisher类和配置Rviz,并在每次Track之后利用MapPublisher类发布可视化信息,这里可以直接复用ORB-SLAM中的MapPublisher类和Rviz。
2.为Map类添加返回相关信息的接口。
3.特别要注意ORB-SLAM2的坐标系下,z轴是朝前的,而Rviz的坐标系下,z轴是朝上的,因此要做相应的转换。
通过以上几个修改,就能在Rviz中显示ORB-SLAM2的地图构建结果和相机位姿了。简单到让我很佩服ORB-SLAM2代码的简洁和松耦合。
ORB-SLAM2的坐标系转换
在对ORB-SLAM2进行实验的过程中,我采用的喜闻乐见的Turtlebot。我们知道ORB-SLAM2的地图构建和定位都是基于自己的map坐标系的,与Turtlebot的坐标系并不产生任何关联。但是我希望将map坐标系融入到Turtlebot的坐标系中,方便之后针对Turtlebot对ORB-SLAM2进行修改和扩展。
首先简单了解下Turtlebot的坐标系。如下图所示。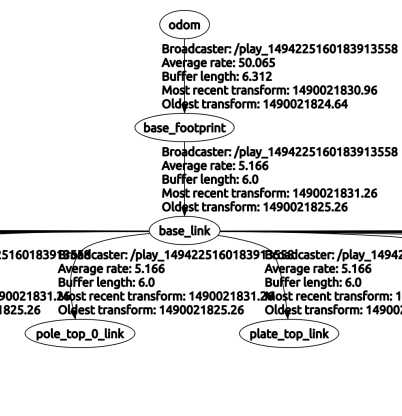
Turtlebot的坐标系遵循odom — base_link — other_link的标准格式。other_link中包含相机的坐标系camera_rgb_frame。
因此要将ORB-SLAM2的map坐标系融合到Turtlebot坐标系中,即形成map — odom — base_link — other_link的标准格式,需要计算map — odom之间的转换关系。
ORB-SLAM2得到的是在map坐标系下相机的位姿,也就是说map — camera_rgb_frame之间的转换是已知的, 在配合上odom — camera_rgb_frame之间的转换关系,map — odom之间的转换关系就不难求解了。具体计算方法可以看看以下的伪代码。
根据以上的思路,在配合ROS中的TF包,很快就能完成map坐标系和Turtlebot坐标系之间的融合。以后如果要查找map坐标系和Turtlebot其他坐标系之间的转换关系,比如深度相机坐标系,IMU的坐标系等,就可能借助TF完成非常快速和方便的查询。
总结
感觉没啥能总结的。